Public Member Functions |
Protected Member Functions |
Protected Attributes |
Private Member Functions |
List of all members
AdaptiveSparseGrid Class Reference
#include <sparseGrid.h>
Inheritance diagram for AdaptiveSparseGrid:
Public Member Functions | |
| AdaptiveSparseGrid () | |
| bool | AddPoint (const IndexDimension I) |
| void | printCoordinates () |
| Prints coordinates of adaptive sparse grid. | |
| void | Print_gnu (string name) |
| Prints coordinates of adaptive sparse grid in gnu-file. | |
| void | PrintActiveHanging (int level) |
| prints active nodes (o) and hanging nodes (x) | |
| void | PrintGridIndices (int level, IndexDimension *Indices, int numberofindices) |
| prints all nodes and highlights given Indices | |
| bool | occupied (unsigned long &indexOfData, IndexDimension I) |
| IndexDimension | getIndexOfTable (unsigned long i) |
| unsigned long | hash (IndexDimension index) |
Protected Member Functions | |
| unsigned long | getFreeSpaceNumberInSecondTable () |
Protected Attributes | |
| unsigned long * | secondTable |
| |
| bool * | isActiveNodeTable |
| |
| int * | indicesSecondTable |
| |
| int * | indicesSupportMin |
| |
Private Member Functions | |
| void | CompleteToLocalTensorProductGrid () |
| |
Detailed Description
adaptive sparse grid
| | | |
| | | | <--- minimalEmpty
| prime | |second |
(index,...) ------------> | table | -----> |table | <--|
hashfunction | | | | |
| | | | ---|
Constructor & Destructor Documentation
◆ AdaptiveSparseGrid()
|
inline |
- Parameters
-
estimatedMaxNumberOfData geschaetzte maximale Anzahl von Speicher-Variablen
Member Function Documentation
◆ AddPoint()
|
virtual |
- 1.)key=Hashfunction(I);
- 2.)ind = primeTable[key];
First Case: ind == 0 (that means primeTable[key] is free)
secondTable primeTable Indices-
secondTable
__ ___ ______
search free | | store f+1 | | | |
space f ------> |f | (to make sure, | | | |
| | that primeTable[key] -----> |f+1| store indices ---> |f |
| | isnt zero by accident) | | (i_1,..,i_d) |f+1 |
| | |___| |... |
| | |f+d-1 |
| | |______|
|__| Second Case: ind=primeTable[key]!=0 (this key was already used)!
- Check if getIndexOfTable(ind-1)=I (remember that data was stored with shift)
- else: Search in secondTable:
secondTable ___ | | | | |f | <--- in secondTable[f] store 1 <---- | | | | | | | | | | | |ind| ---> 1 is stored because indicesSecondTable[ind] is already used; |__ | so now search for new freespace f, delete 1 and store f+2 instead (and store indices (i_1,...,i_d) in indicesSecondTable)
Reimplemented from AdaptiveSparseGrid_Base.
Here is the caller graph for this function:

◆ CompleteToLocalTensorProductGrid()
|
private |
adds all father points including boundary points
Einfachere Methode als CompleteToLocalTensorProductGrid(). Überprüft Definition.
◆ getFreeSpaceNumberInSecondTable()
|
protectedinherited |
- Returns
- index k such that secondTable[k] is empty
Here is the caller graph for this function:

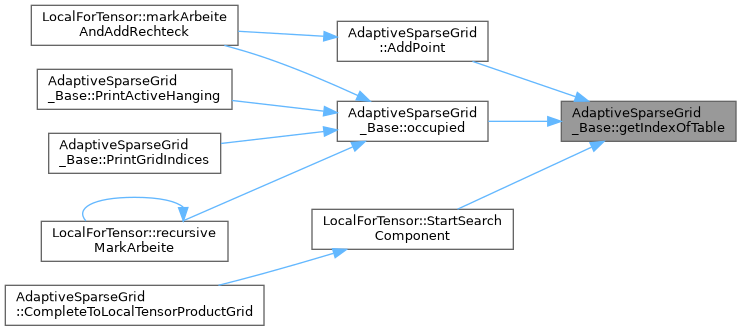
◆ getIndexOfTable()
|
inlineinherited |
- Parameters
-
i kodierung des Index als langer unsigned long
- Returns
- IndexDimension "=(i_1,...,i_d)"
Here is the caller graph for this function:
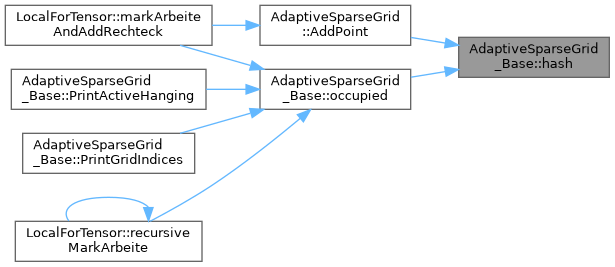
◆ hash()
|
inlineinherited |
- Returns
- unsigned key
Here is the caller graph for this function:
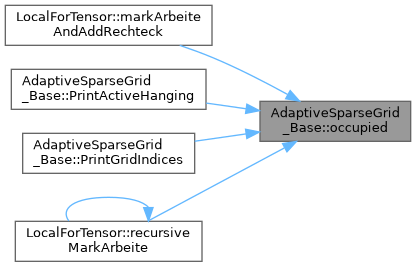
◆ occupied()
|
inlineinherited |
schaut nach ob Punkt im Gitter ist
- Parameters
-
I index des Punktes indexOfData return: index der daten, falls Punkt im Gitter ist
- Returns
- true, false je nachdem ob Punkt im Gitter ist
Here is the caller graph for this function:
The documentation for this class was generated from the following files:
- /home/runner/work/LoAdSG/LoAdSG/library/source/sgrid/sparseGrid.h
- /home/runner/work/LoAdSG/LoAdSG/library/source/sgrid/localTensorProduct.cc
- /home/runner/work/LoAdSG/LoAdSG/library/source/sgrid/sparseGrid.cc